
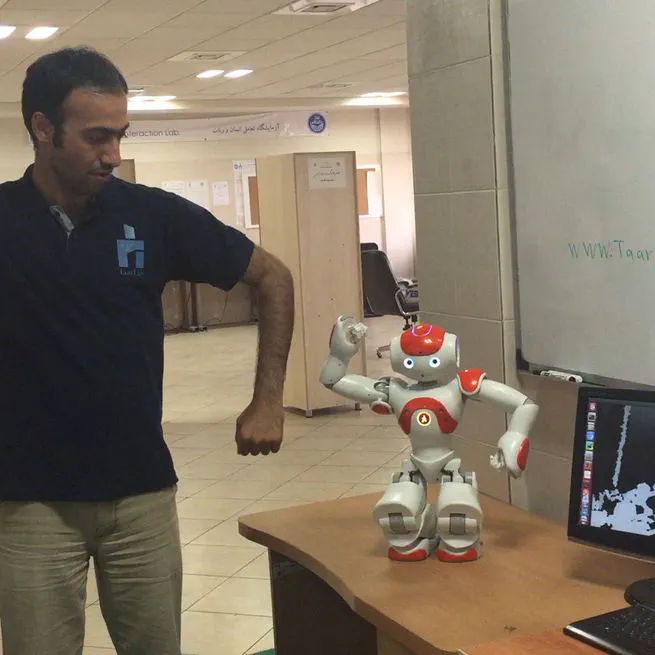
Balance Strategy for Human Imitation by a NAO Humanoid Robot
Abstract: This paper presents an ankle-based balance strategy for a NAO humanoid robot while imitating the human motions. In this approach, first, an inverted pendulum model based on the computed Center of Mass (CoM) is introduced and then, the support polygon is computed for each double support and single support phases. Center of the support polygon is assumed as the reference for balance controller and Ground projection of the Center of Mass (GCoM) is considered as the balance criteria. Using ankle joints correction, GCoM is restricted to the center of the support polygon. In order to control the balance criteria a Proportional-Integral-Derivative (PID) controller is used. The coefficients are first estimated using Ziegler-Nichols method; then, they were tuned by considering advantages of the imitation process. Implementation of the proposed approach leads to a better result in preserving the balance of the robot in soft realtime imitation of human whole-body and quasi-static motions. The proposed approach is validated by performing simulation and practical tests on a NAO H-25 version 4 robot.
Jan 1, 2017
A simple and fast geometric kinematic solution for imitation of human arms by a NAO humanoid robot
Abstract: This paper addresses the imitation procedure of the human arms by a NAO humanoid robot. The exact position of the user arms are obtained based on the position of him/her shoulders, elbows and wrists, which are obtained by using the Microsoft Kinect as a 3-dimensional optical motion capture sensor. Communication between the kinect and computer server is done by using Robot Operating System (ROS) framework. Due to the differences between human and humanoid robot dimensions, captured motion should be mapped on the robot’s dimensions. Mapped data is used for kinematic operation. In this paper, the inverse kinematic problem is solved by proposing an approach based on a novel simplified geometric method. In this approach, the distal form of the Denavit-Hartenberg convention of both arms is studied and a simple and fast geometric inverse kinematic solution is proposed. Finally, the proposed method is verified experimentally in Webots simulator and on a real NAO-H25 humanoid robot. Experiments are resulting in a coherent imitation between human arm and NAO with respect to time response.
Jan 1, 2016

An example conference paper
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Duis posuere tellus ac convallis placerat. Proin tincidunt magna sed ex sollicitudin condimentum.
Jul 1, 2013